Welcome to the blog of Dr. Ken Tindell, CTO of Canis Automotive Labs. This blog is focused on the work
Canis is doing on CAN bus and CAN security, but also covers the design of
embedded software and hardware for automotive systems and the Yes We Can project at Canis that
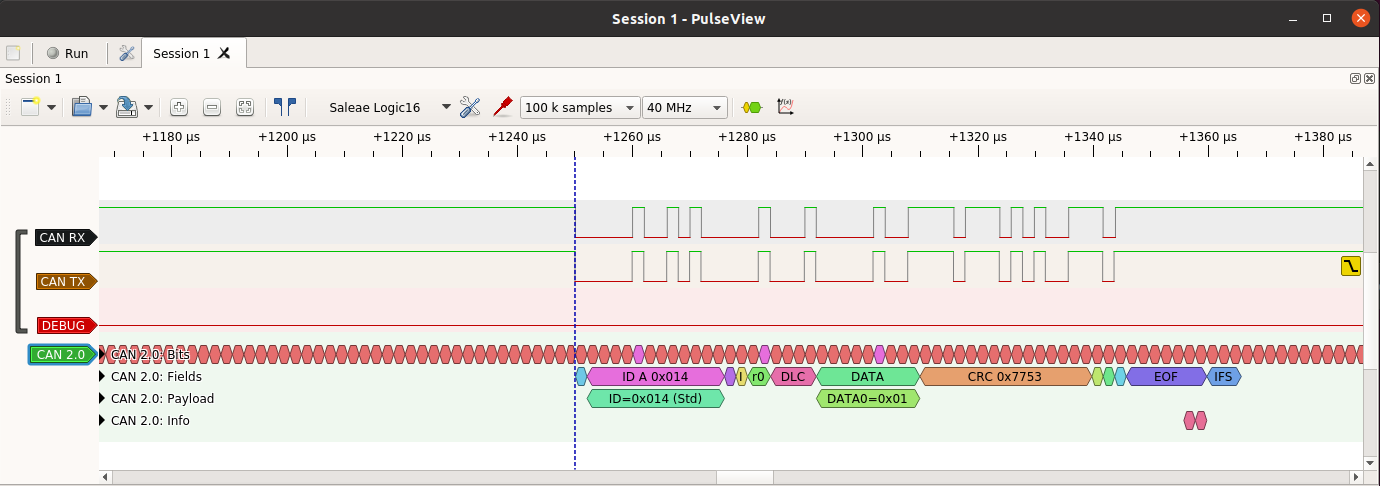
develops hardware, software and tools for CAN bus: the CANHack toolkit
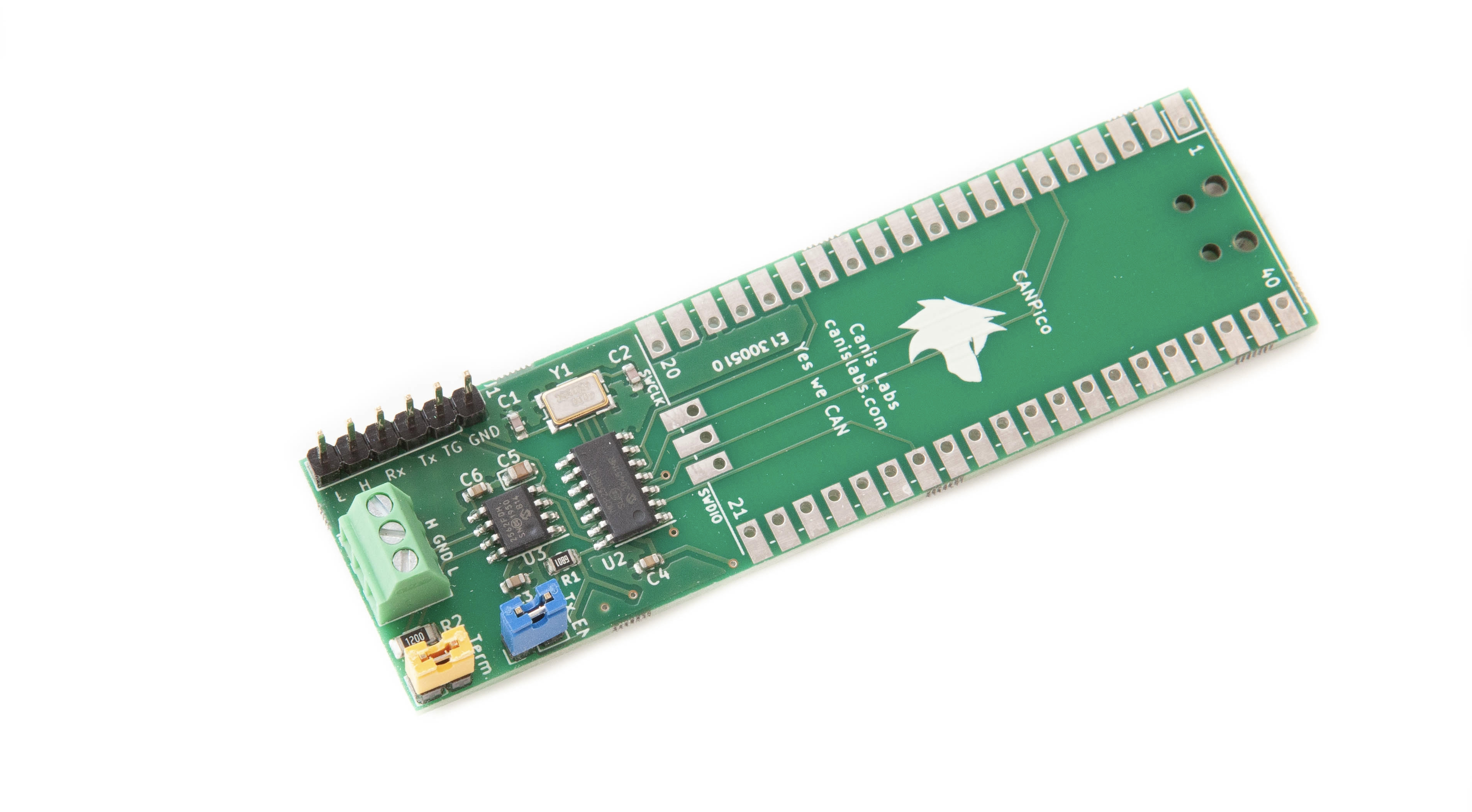
for injecting faults into the CAN protocol, CANPico and CANHack hardware boards for
the Raspberry Pi Pico, and the can2
logic analyzer CAN protocol decoder.
Archive of posts with category 'MicroPython'
Here I will explain how one of our CANPico boards can be made into a
USB CAN adapter firmware to display CAN frames on the bus in Wireshark.
We’ve pushed a new version of the CANPico firmware that updates it to MicroPython v1.16. The update also fixes some bugs but the biggest change is that the firmware adds...
Now that the CANPico board is available for order online
from SK Pang we thought
it would be good to make a short video on getting started with it.
The CANPico board is at last available, and ready for order online from SK Pang. It’s been a long time coming, longer than we expected thanks to some major problems...
We have recently been developing an API for CAN under MicroPython for the new CANPico board from Canis Automotive Labs. There are some really neat features of the CAN support...
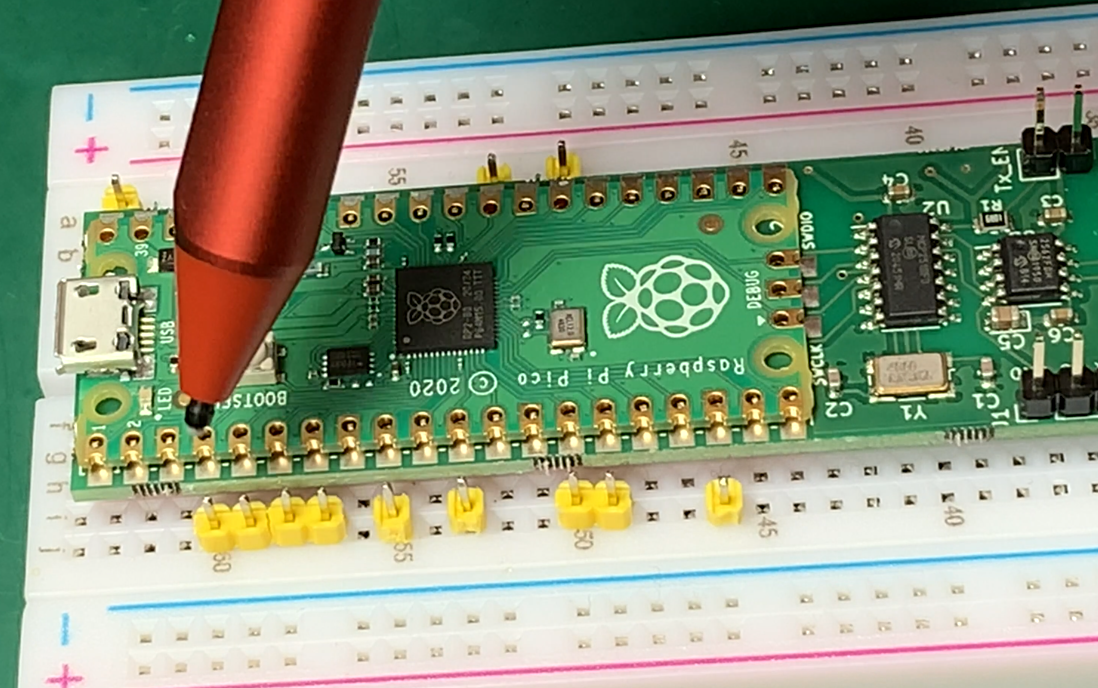
The Raspberry Pi Pico doesn’t have a CAN controller built-in but that’s
no barrier: we can send CAN frames in software!
For the last few weeks we’ve been developing the CANHack toolkit for CAN protocol hacking. It’s a portable bit-banging library to emulate the minimal parts of the CAN protocol required...