Featured Posts
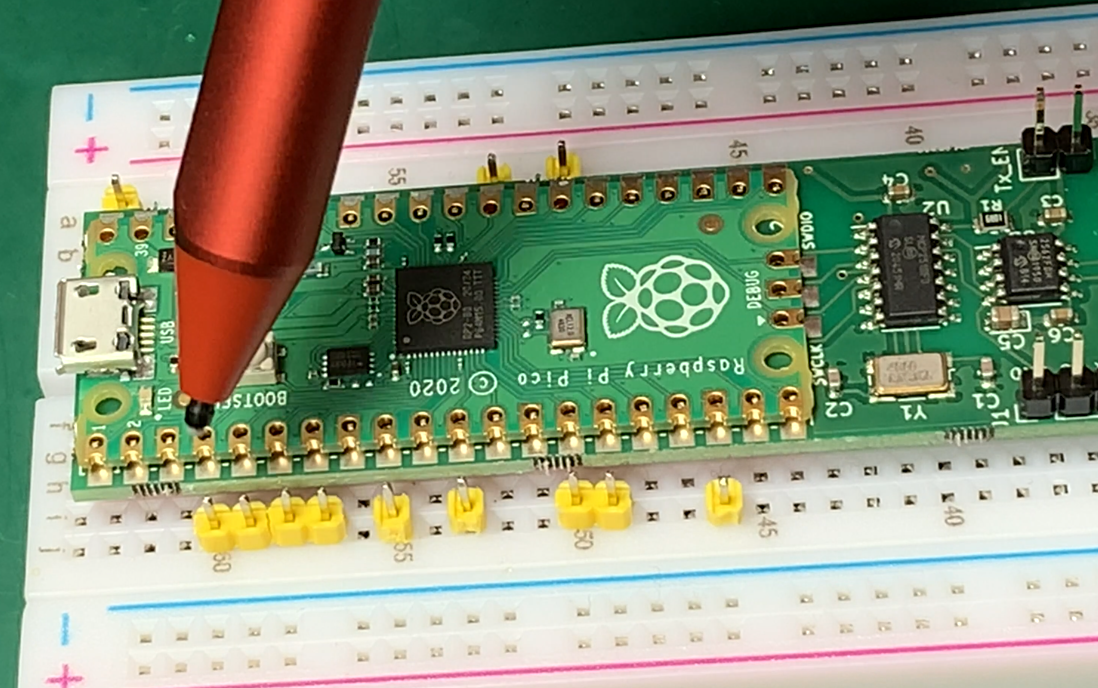
Video intro to CANPico
Now that the CANPico board is available for order online from SK Pang we thought it would be good to make a short video on...


CAN Priority Inversion
The problem of priority inversion is well-known and.. actually, scratch that: it’s clearly not well known at all because people keep making the same mistake....
All Posts
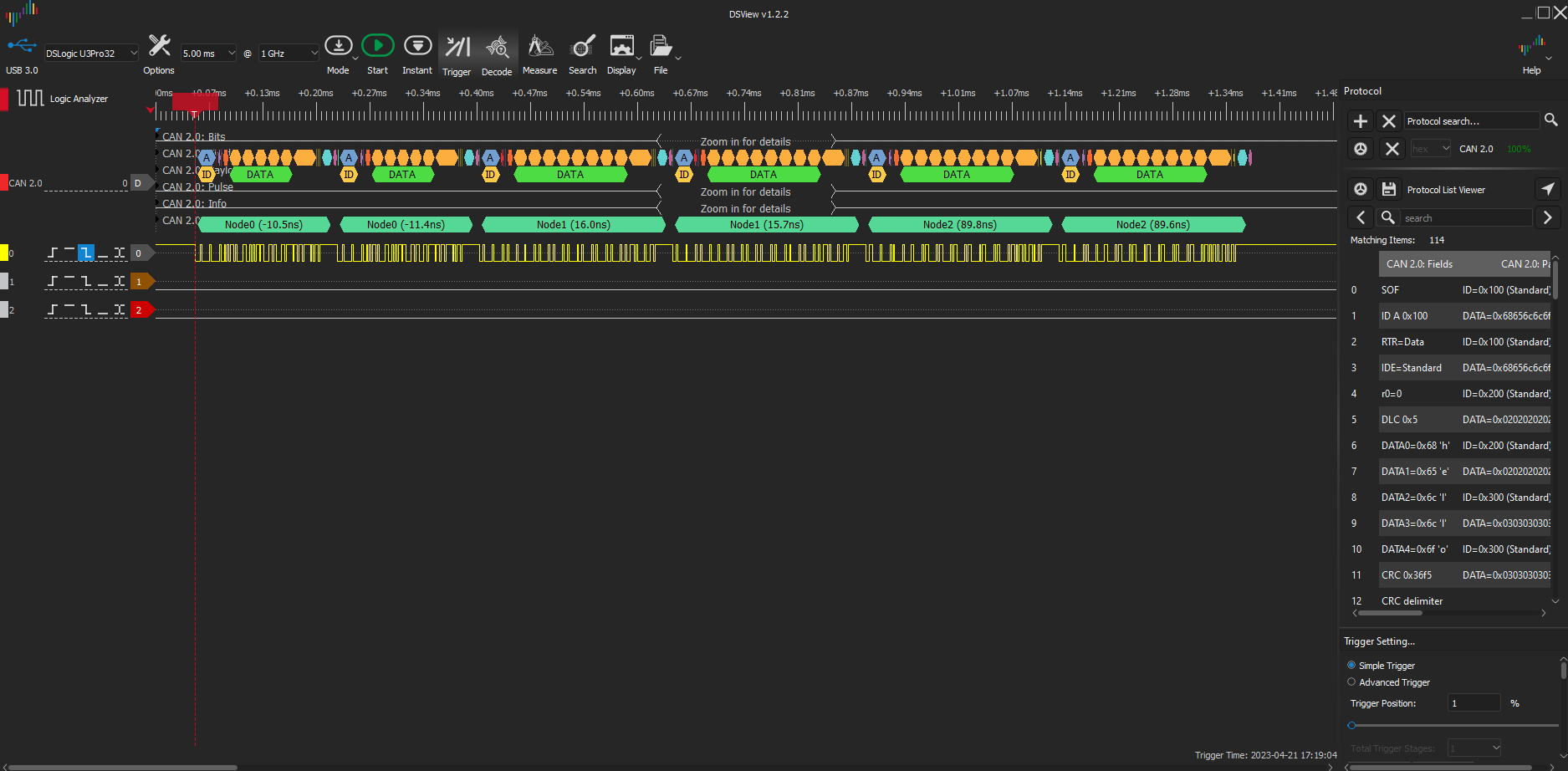
Inferring the sender of a CAN frame
The latest update of the open source can2 protocol decoder is able to automatically infer the sender of a CAN frame. It uses the method of deterministic distortion of CAN...
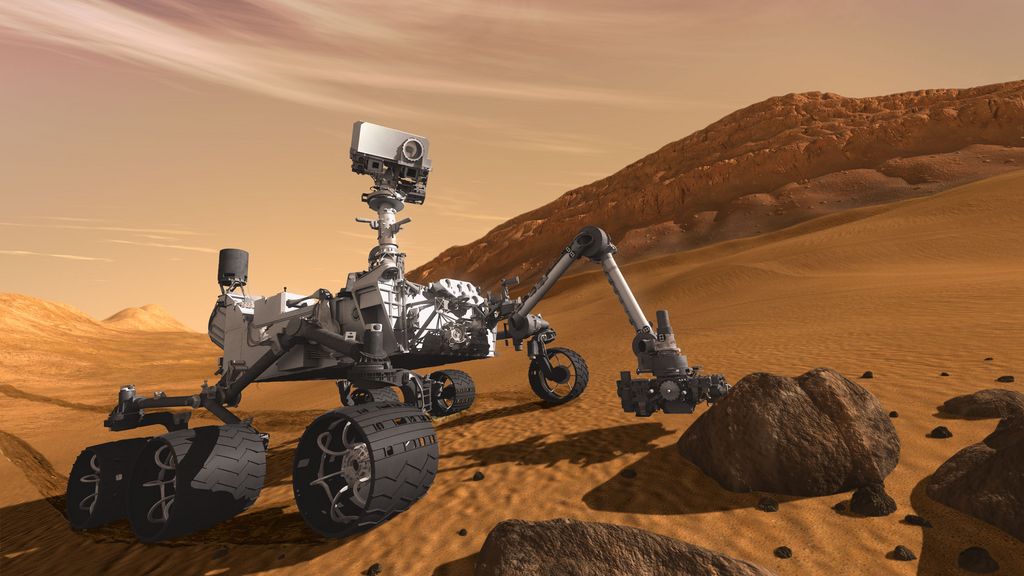
Get your app to Mars!
This is a blog post about firmware updates, and I was inspired to write it by the news that NASA’s Curiosity rover on Mars has got an OTA update. The...
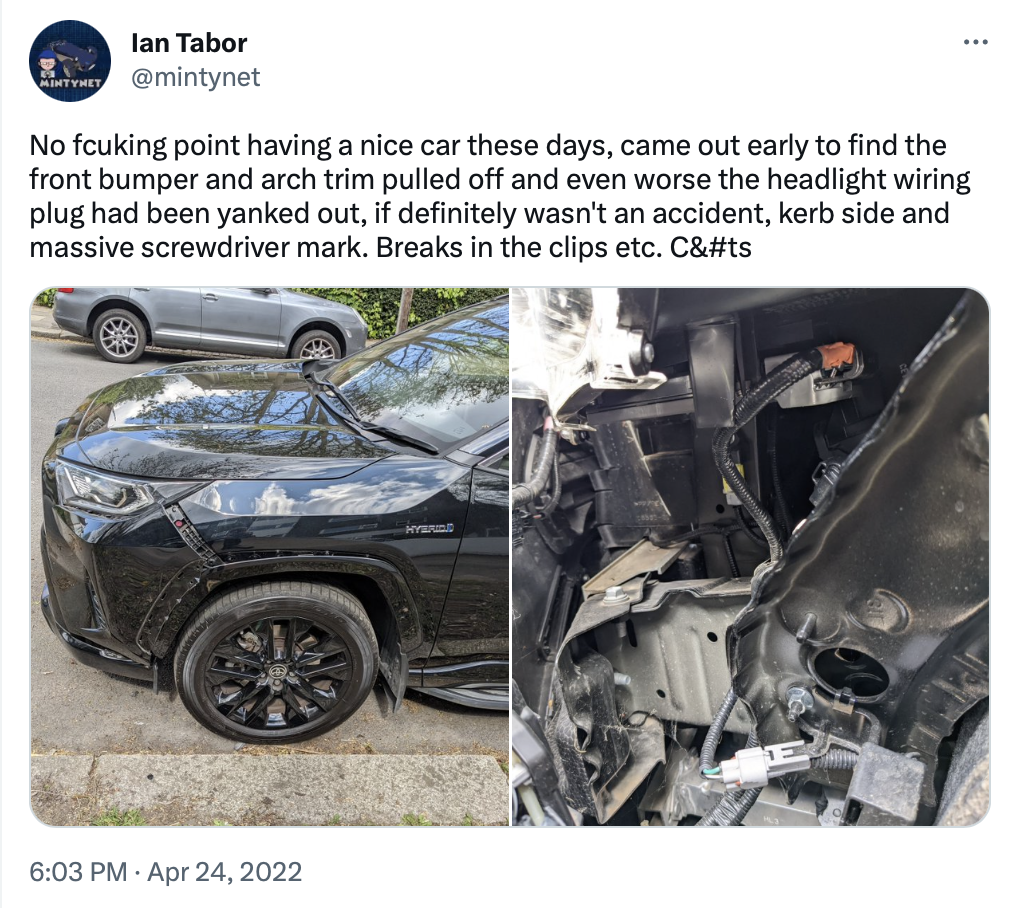
CAN Injection: keyless car theft
This is a detective story about how a car was stolen - and how it uncovered an epidemic of high-tech car theft. It begins with a tweet. In April 2022,...
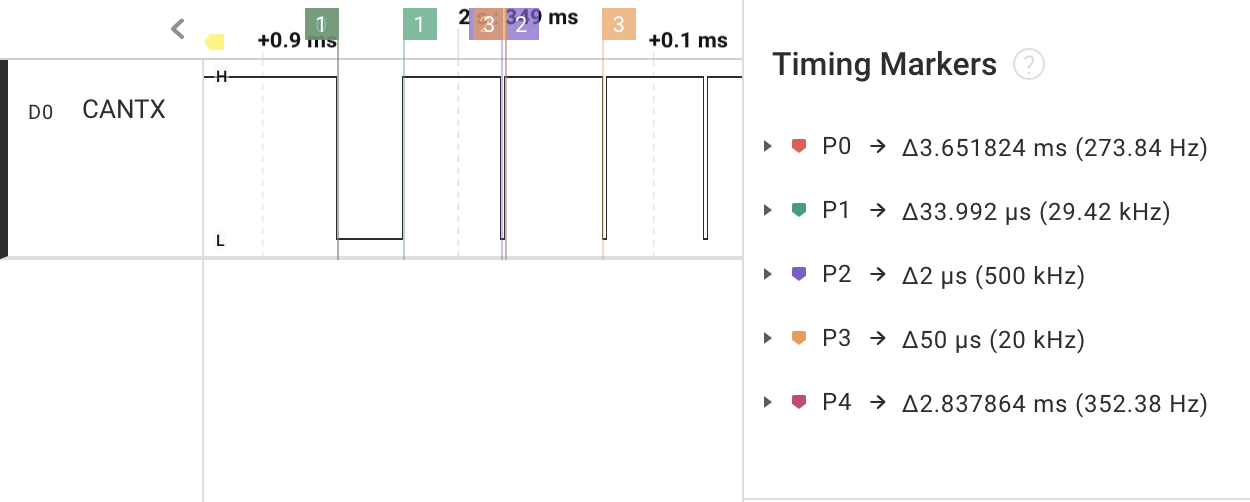
CAN Quiz Question #2: Answer
The question: There is a CAN node that’s acting very strangely on a 500kbit/sec CAN bus. What is happening?
CAN Quiz Question #2
This is the second CAN Quiz Question on the CAN protocol. This one is quite hard and not only tests knowledge of the dark corners of the CAN protocol, it...