
The CANPico board is at last available, and ready for order online from SK Pang. It’s been a long time coming, longer than we expected thanks to some major problems with component availability (the CANPico uses automotive industry chips, which have been in particularly short supply).
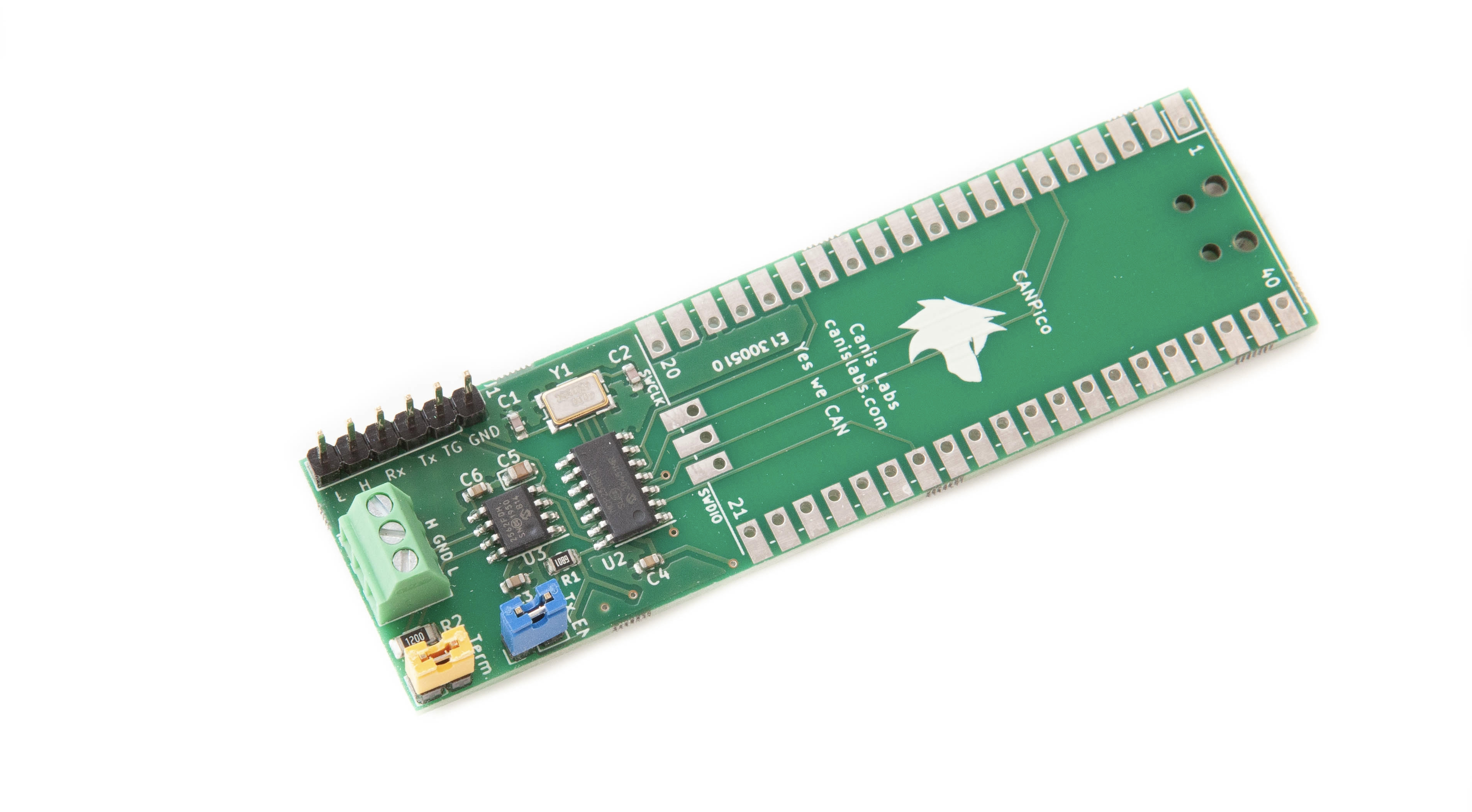
The CANPico uses a Microchip MCP2517/18FD CAN controller with 2Kbyte buffer space and the Microchip MCP2562FD CAN transceiver. There are also jumpers to connect a standard 120Ω CAN bus termination resistor and for disabling transmit access to the CAN bus (useful for secure listen-only access). There’s also a 6-pin header for a logic analyzer or oscilloscope to see what’s happening on the bus (with a pin under software control for triggering).
Along with the board is pre-built MicroPython SDK firmware, with a CAN API that includes priority-inversion free drivers, accurate timestamping (both send and receive), control of CAN ID filters, and a simplified CAN bit rate setup. There is a hardware reference manual and a separate reference manual for the MicroPython SDK. The source code for the SDK is available as a patch against the v1.15 MicroPython release.
The firmware, reference manuals, schematics and Kicad design files can all be found on the YesWeCAN GitHub repo.
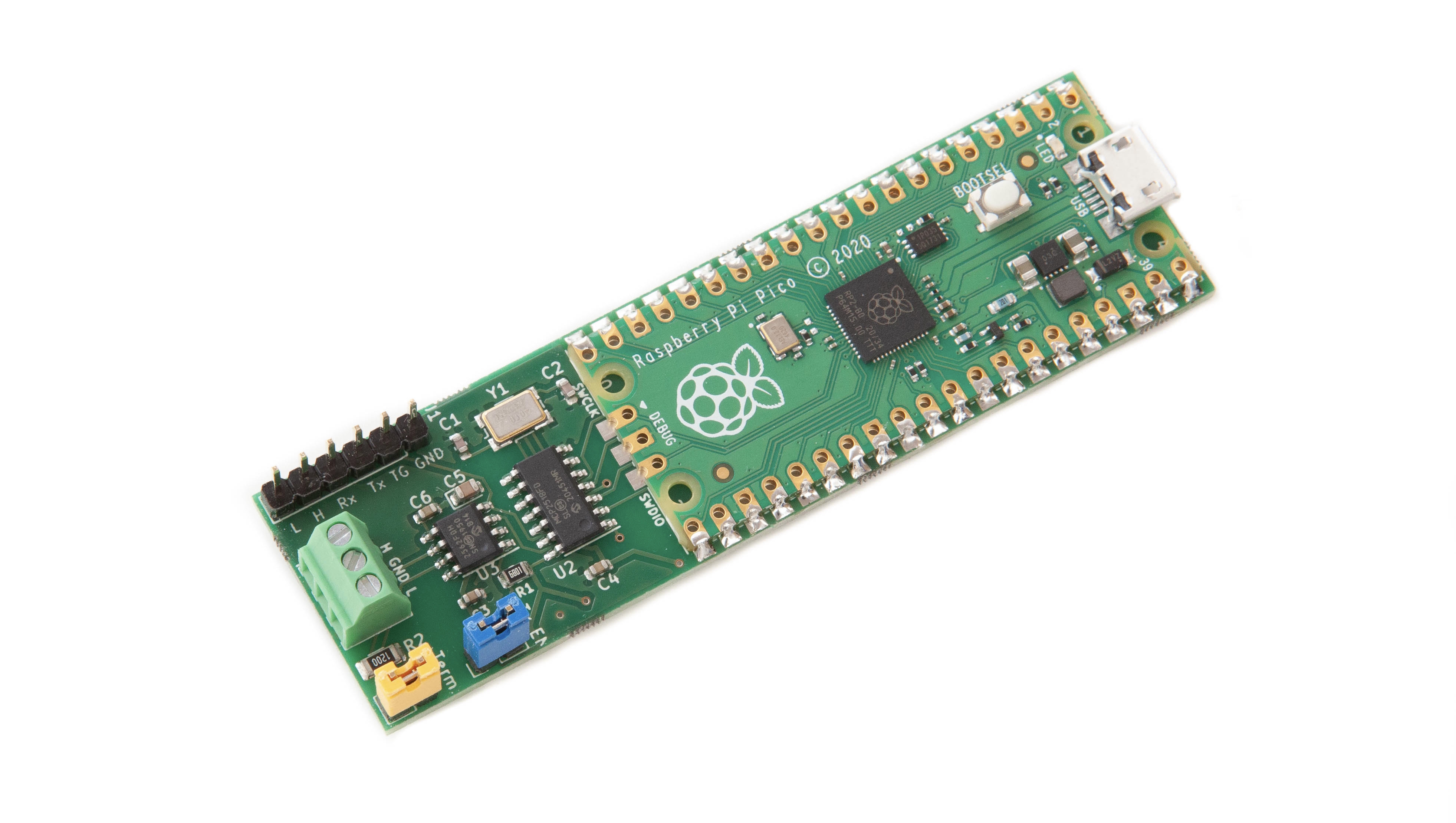
The CANPico from SK Pang is sold with a Raspberry Pi Pico and the firmware pre-installed.
